Kinematic Sensitivity Robotics Thesis
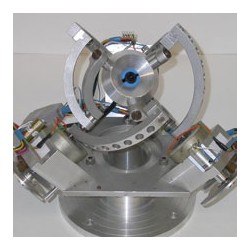
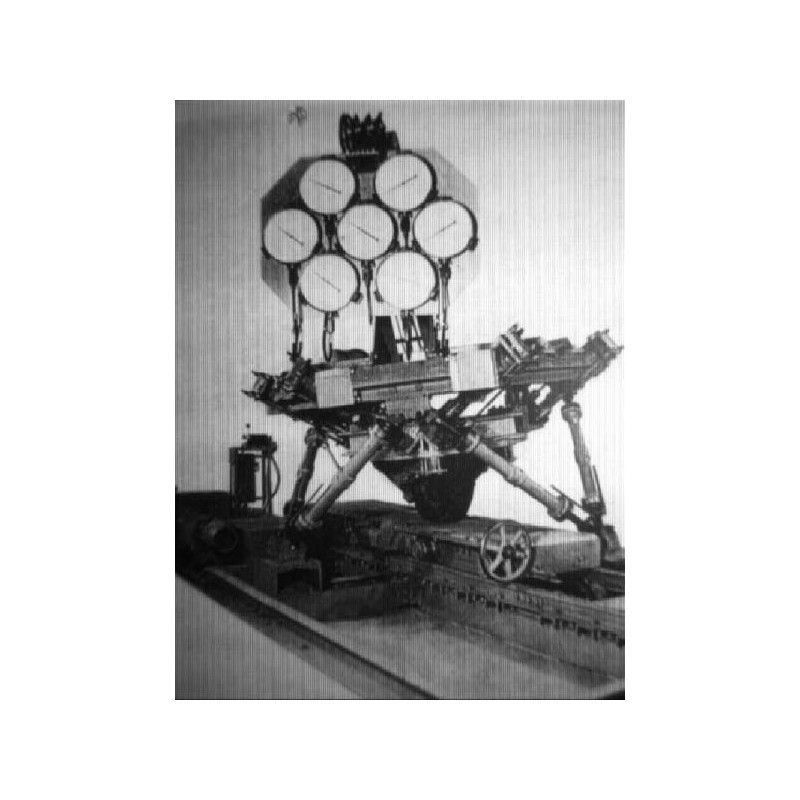
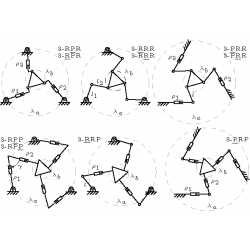
The sensitivity of the animated plate parallel mechanisms to the errors in design and control is of great importance.
. In fact, the design of these mechanisms should be designed to minimize the impact of the final executor from different types of uncertainty. Therefore, a variety of indicators have been proposed by researchers so far to evaluate the quality of the performance of these mechanisms, most of which have many conceptual difficulties in terms of physical and functional interpretation, and the only reliable indicator is the kinematic sensitivity index.

Security policy (edit with Customer reassurance module)

Delivery policy (edit with Customer reassurance module)

Return policy (edit with Customer reassurance module)
Kinematic Sensitivity Robotics Thesis
The sensitivity of the animated plate parallel mechanisms to the errors in design and control is of great importance.
. In fact, the design of these mechanisms should be designed to minimize the impact of the final executor from different types of uncertainty. Therefore, a variety of indicators have been proposed by researchers so far to evaluate the quality of the performance of these mechanisms, most of which have many conceptual difficulties in terms of physical and functional interpretation, and the only reliable indicator is the kinematic sensitivity index.

Data sheet
Kinematic Sensitivity Robotics Thesis
The sensitivity of the animated plate parallel mechanisms to the errors in design and control is of great importance.
. In fact, the design of these mechanisms should be designed to minimize the impact of the final executor from different types of uncertainty. Therefore, a variety of indicators have been proposed by researchers so far to evaluate the quality of the performance of these mechanisms, most of which have many conceptual difficulties in terms of physical and functional interpretation, and the only reliable indicator is the kinematic sensitivity index.