- On sale!












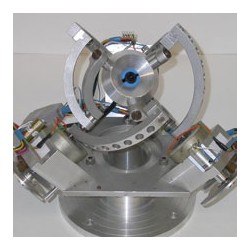
Dynamic base robot kinematics present. 87
Robot's trajectory and kinematic relationships in the first experiment (a) the path (b) along the angle θ (c) along the X-axis (d) along the Y. 90 axis.
Figure 4-3 Robot trajectory and kinematic relationships in Experiment 2 (a) Route

Security policy (edit with Customer reassurance module)

Delivery policy (edit with Customer reassurance module)

Return policy (edit with Customer reassurance module)
list of titles
page title
1 Introduction: 11
1-1 Background 11
1-1-1 Detailed mechanical system 12
Stimulants 12.1
1.1.1 Transmission Tools or Systems 12
Sensors 12.1
1-1-5 Brain or Computer Robot 12
1-2 Historical Segmentation of Robots 14
Non-Programmable Robots or Zero Generation Robots
1.2.2 Programmable Robots First Generation Robots 14
1-2-3 Adaptive Robots or Second Generation Robots 14
1.2.4 Smart Robots or Third Generation 14
1-3 Sensors in the robot 15
1-3-1 Video Camera 21
1-3-2 Odometer 22
1-3-3 Ultrasonic Waves 23
Application of Ultrasonic Sensors in Robotics 24.3
1-3-5 Sonar Sensor: 26
6.3.6 Sensor Performance: 27
4-1 Types of Robots and their Applications in Industry: 27
1-3-7 Production 28
1-3-8 Exploration, Search and Extraction 28
1-3-9 Medicine 29
1-3-10 Construction Works 30
1-3-11 Series Robots in Factories 31
Control Methods 35
6-1 PID control: 37
1-4 Artificial Neural Network 37
1-4-1 History 37
1-4-2 Definition 38
1-4-3 Neural Network Components 39
1-4-4 Neural Network Training 40
1-4-5 Neural Network Application 41
Fuzzy Logic 42
1-6 Office Models 43
1-7 Genetic Algorithms 44
1-7-1 Local Optimal and Overall Optimal 46
Operators of a Genetic Algorithm 48
8-1 Project Motivation and Necessity: 48
2 Introduction 51
The concept of mobile robot navigation 53
2.2 Integration of information into mobile robot navigation 54
2.2.2 Integration of low and high level information 55
2-3 Sound waves 56
2.3.1 Ultrasonic Sensors 57
2-3-2 sonar 58
2-3.3 Active sonar 60
2.3.4 Active sonar data analysis 62
2.3.5 Inactive sonar 63
6-3 Sound Speed 63
2.3.2 Sound Source Identification 65
8.3 Noise 66
9.2.3 Sonar in War 67
2-4 Recursive Signal Identification 67
2-5 Acoustic Fractures 69
2-5-1 Application of Acoustic Fractures 69
2-6 Summary 70
Modeling and introduction of intelligent systems 72
3.1 Neural Networks 72
3.1.1 Stimulus Functions 73
3.2 Hopfield Network 73
3.2.1 Hopfield Network Structure 74
3.2.2 Hopfield Network Performance 75
3.2.2 Competitive Networks, Self-Regulation 75
3.2.2 Discrete Hopfield Network: Sequential (Asynchronous) Model 76
3.2.2 Energy Function in Hopfield Networks 76
6.2.6 Training Stage (Template Storage) 76
7.2.7 Hopfield Network Online 77
3.2.2 Capacity of Hopfield Networks 77
3.2.2 Evolutionary Algorithms 77
3.2.2 Convergence of Evolutionary Algorithms 78
Fuzzy Controllers 79
3.3.1 General Structure of Fuzzy Controllers 79
Knowledge Base 81
3.3.3 Decision Making or Inference Engine 81
3.3.4 Non-fuzzy 81
3.3.5 Types of Fuzzy Controllers 82
3.3.5.1 Indirect fuzzy controller 82
3.3.6 Learning Abilities of Controllers 83
3.3-6-1 Supervised Learning 84
3-4 Summary 85
4 The kinematic control equations of the present robot 87
4-1 Design of controller 92
4-2 Routing the robot in an unknown environment by neural fuzzy control method 94
4.2.2 Precise Modeling of the Environment 94
4.2.2 Neural Network Operator 96
4.2.2 Robot Controller 97
4-3 Target Identification in Unknown Environment 101
4-4 2 Autodetection 102
4-5 Neural Network Positioning Objects 104
4-6 Multilayer Perceptron Neural Network 107
4-6-1 Evolutionary Differential Optimization 108
4-6-2 Optimization by the Levenberg-Marquardt error propagation method 108
4-6-3 ANFIS 109 Network
4-6-4 LoLiMoT 111 Network
4.6.5 Neural Network Testing 112
4-7 Executing Algorithm Finding Target in Unknown Environment 117
4-8 Conclusions and Discussion 118
5 Routing dynamic base robots in known environment 121
5-1 Introduction 121
5-2 Route Design in a Known Environment 121
5.2-1 Optimal Time and Energy Control 122
5-2-2 Designing a Robot Route Offline 123 Offline
5-3 Designing a Track Controller for Multi-Robot Collaboration 125
5-3-1 Nonlinear Robot Kinematics Control Equations 125
5.4 Conclusions and Discussion 127
6 Conclusion and Recommendation of Future Work 129
List of images
page title
figure 1. 1 Robot Schematic 14
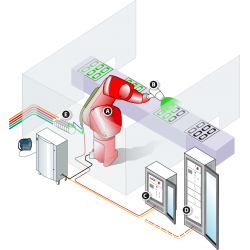
figure 1. 2 Schematic of controller and sensor in robot 15
figure 1. 3 Contact pressure sensors 18
figure 1. 4 Incremental Encoders 20
figure 1. 5 units of light 20
figure 1. 6 Robot vision system 21
figure 1. 7 How to move the sensor 22
figure 1. 8 Examples of Ultrasonic Sensors in Robotics 25
figure 1. 9 Examples of Robotic Sonar Sensors Applications 26
figure 1. 10 Robots sent to Mars 29
figure 1. 11 Surgery Using Robot 30
figure 1. 12 Earthquake Relief Robot 31
figure 1. 13 Okada Robotic Robot 32
figure 1. 14 Stanford Robots 32
figure 1. 15 Utah Robotics Robot 33
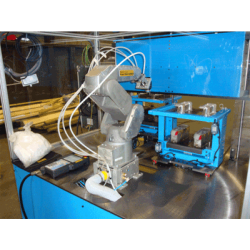
figure 1. 16 High Flexibility MultiChoiceGripper's skilled arm in capturing objects of different shapes 34
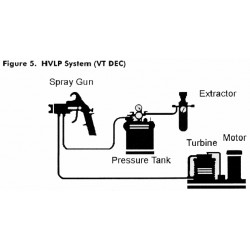
figure 1. 17 Color Grapefruit Spray Design
figure 1. 18 Robots used by Clayman 35
figure 1. 19 Robots Used in (Seung Kwan Song 2009) 36
figure 1. 20 neural networks with one hidden layer, three inputs and two outputs 40
figure 1. 21 Global and local optimization. 47
Figure 2-1 Data in a closed environment 54
Figure 2-2 illustrates the paths crossed by a robot. 56
Figure 2-3 Routing the bat with sound waves 57
Figure 2-4 Sending and Receiving Signals 59
Figure 2-5 Basics of calculating the distance using acoustic waves 60
Figure 2-6 Active sonar data analysis 62
Figure 2-7 Underwater sonar waves 63
Figure 2-8 Sonar in robot 64
Figure 2-9 Using several sensors to reduce noise. 66
Figure 3-1 shows a neuron without a bias vector b and in the right-hand figure a neuron with a bias vector b. 72
Figure 3-2 How to Use Bootstrap Functions. 73
Figure 3-3 Hopfield Network Functional Sample 74
Figure 3-4 Backward and Forward Performance in Neural Networks 74
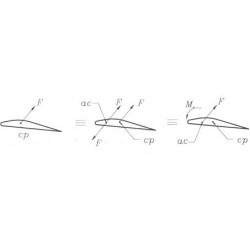
Figure 4-1 Dynamic base robot kinematics present. 87
Figure 4-2 Robot's trajectory and kinematic relationships in the first experiment (a) the path (b) along the angle θ (c) along the X-axis (d) along the Y. 90 axis.
Figure 4-3 Robot trajectory and kinematic relationships in Experiment 2 (a) Route

Data sheet
You might also like
Dynamic base robot kinematics present. 87
Robot's trajectory and kinematic relationships in the first experiment (a) the path (b) along the angle θ (c) along the X-axis (d) along the Y. 90 axis.
Figure 4-3 Robot trajectory and kinematic relationships in Experiment 2 (a) Route