

Dynamic Modeling and Control

Security policy (edit with Customer reassurance module)

Delivery policy (edit with Customer reassurance module)

Return policy (edit with Customer reassurance module)
Dynamic Modeling and Control
1 Robot Mechanism
Examples of the work done in this regard include the robot designed by Akkada. The robot system consisted of a five-degree-of-freedom arm. As shown in Figure 1, this arm is attached to an 11-degree-of-freedom robot clamp. There are three robots, each with 4 degrees of freedom, while sixty have only three degrees of freedom.
The Stanford / JLP clamp was constructed using human resemblance and kinetic and control concerns. The final design of the clamp was based on a number of analytical and visual procedures. Here, hand simulation was used to optimize the robot's relative position, bond length, and joint range of motion.
Salisbury also uses a sensor at the tip of the robot that is able to determine the position, size, and direction of a force applied by point contact. The line of action of a force can be determined if the forces and torques are known by the sensor.
figure 1. 1 Okada robot
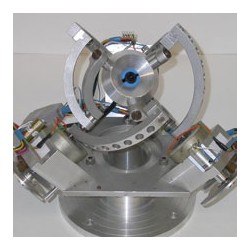
figure 1. 2 Stanford Robots
Utah's clamp biology model provides evidence that such a design is capable of very complex manipulations. The MIT clamp has three robots with four degrees of freedom and one thumb with four degrees of freedom and is the most specific attempt to achieve a human-like true clamp (Fig. 3). Since the clamp is used for remote operation research, its primitive design is comparable to the human hand. This clamp is energized very quickly by the use of wind cylinders through the polymer tendons.
figure 1. 3 Utah Robots
MIT clamping is in turn activated using a 2N tendon strategy that requires a system of 32 independent tendons and cylinders. This is suitable for adaptive control of objects, since its antagonistic organization allows the stiffness of the joints to be controlled. Utah's clamp control system performs two reaction movements that are seen in human hands. (1) elementary hardness; and (2) end torsion. Because its design is very close to human hands, it can be used as a slave device in a telecommunications system.
Another example is the skilled arm of MultiChoiceGripper, which specializes in capturing time-varying objects. The robot with high adaptability, versatility and flexibility is made possible in a variety of forms using Finest Festo's unique technology. Using this feature it can hold fragile objects without any additional sensors or control technology. Imaginable applications for this device include things like auxiliary robotics for assembly jobs or production centers where different products are made.
figure 1. 4 High Flexibility MultiChoiceGripper's skilled arm in capturing objects in different shapes
In another project, the tomato harvesting robot was introduced by Gripper, which is intended to design the model and gripper as shown in the figure below.
figure 1. 5 Tomato Gripper Grip Design
1-1-1 Control Analysis
One of the basic issues in examining robots is to get them to follow a predefined path for the end-user. Although many industrial applications require the robot's final contact with the environment, at the earliest stage a robot must be able to move precisely in space and be able to be within a certain distance of objects. The major methods of controlling a robot are mainly divided into two modes without model and model based. As the name implies, the first group does not need to derive any model and uses a mechanism derived from the actual robot to control a mechanism, the most famous of which is the proportional controller. - Derivative-integral derivative noted. The other group requires the kinematic and dynamic model of the robot. In this study, the classical sliding mode controller [3] was used to control the six-degree-of-freedom Gaf Stewart robot. In the third section, of course, we discuss another control strategy model that will try to predict vibrational motion.
PID controller
The PID controller has a long history since its introduction in 1942 by Ziegler and Nichols. The PID controller is a closed-loop feedback mechanism, which is widely used in the industry, such as speed regulation, temperature, current, pressure and other variable processes. This controller operates based on the amount of error between the process output and the calculated desired input value. The purpose of the controller is to try to minimize the error by adjusting the process control inputs. In PID Controller Position Coefficient, Judges Current Moment Errors, Integral Coefficient, Applies Past Error Impact

Data sheet
Dynamic Modeling and Control