- On sale!
Induction Speed 10.2
2.2-11 Conical Angle 11
2-2-12- Blade loss factor 11
2-2-13- Flutter 12
2-2-14- Backward or Dragging13
2-2-15- Cyclic feathering14
3.2.2 Selecting Airfoil Blades 43
3.2.2 Selecting the shape of the blades 46
3.2.2 Selecting the shape of the cross section of the blades 47
3.2.2-Calculate the rotor inertia 48

Security policy (edit with Customer reassurance module)

Delivery policy (edit with Customer reassurance module)

Return policy (edit with Customer reassurance module)
Induction Speed 10.2
2.2-11 Conical Angle 11
2-2-12- Blade loss factor 11
2-2-13- Flutter 12
2-2-14- Backward or Dragging13
2-2-15- Cyclic feathering14
2-2-16- Collectives leverage15
2-2-17- Cyclic lever 15
Helicopters 16
Chapter 3 Conceptual Design, Theory Relations 18
Introduction 19
3.2 Conceptual Initial Design 20
Designing Components 27
3.2.2 Calculate the radius of rotor 28
3.2.2 Selecting the maximum speed of the blades 32
3.2.3 Estimating the highest coefficient of solidity33
3.2.2 Calculating the chord of the blades 37
3.2.2 Selecting the amount of longitudinal torsion of the blades 39
6.2.6 Selection of Blades Thinning 41
3.2.2 Selecting Airfoil Blades 43
3.2.2 Selecting the shape of the blades 46
3.2.2 Selecting the shape of the cross section of the blades 47
3.2.2-Calculate the rotor inertia 48
3-2-11- Rotor 50 rotation selection
3-2-12- Angle the main shaft 50
3-2-13-Distance of flutter hinge from axis of rotor 51
3-2-14- The hinge on and off 55
3-2-15-hub rotor 55
3.2.2- Cyclical and Collective Step Angle Boundaries 56
3-4- Calculating the power required and selecting the engine 57
3.4.1 Power Classification 58
Stationary flight 59
3-4-3- Ascent 60
3-4-4- Forward flight 61
Effect of temperature 63
6.4-6- Proximity effect of the earth 64
4.7.7 Determining the Maximum Power Required and Selecting the Engine 66
Design of the tail rotor 67
3-5-1- Select the type of rotor 67
Estimation of the diameter of the tail rotor 71
3.5.3 Selecting the maximum speed of the blades 72
4.5.3 - Calculation of the tail rotor 73
3.5.5 Estimation of the stiffness coefficient 76
6.5.5 Selecting the number of blades and calculating their chord 77
7.7.5. Selecting the amount of longitudinal torsion 77
8.8.5 Selecting Airfoil 78
9-9.5 Rotor Rotation 78
10.5.5-Vertical position of the tail rotor 79
11.5.5- Scope of blade step changes 80
12.5.5.5 How to connect the tail rotor 81
13.5.3 Designing Horizontal and Vertical Tails 81
3-6- Choosing Jiru 82
3.6-1 What is Jiro?
3.6.2 Types of Jiru 82
3.6.3 Mode of Operation 84
3.6.4 Classification by Sensitivity to Jiro 87
3-6-5- Choosing Jiro 87
3.7 Estimating the Weight of Essential Components and Systems 87
Main rotor blades 88
3-7-2- hub main rotor 88
Horizontal tail 89
Vertical tail 89
3-7-5- 90-degree rotor
6.7-6- Body 91
3-7-7- The landing gear 92
3-7-8-Engine 93
3.9-9- Fuel system 93
Power transmission system 93-7
Control Systems 94
8-8- Assembly of important helicopter components and systems 95 Weight analysis
Chapter 4 Design and Selection of Radio Controller Helicopter Components 107
4-1- Introduction 108
Designing Components 108
4.2.2 Final Components 109
4.3 Mounting the helicopter components 114
4.4 Supplementary Tips on Assembly and Installation of Parts 108
Tail section 122
4-4-2- Main rotor assembly 123
4.4.3 Balance of main locusts 124
4.4.4 Installing Servers, Receivers and Batteries 124.
4-4-5 Installing Jiru 125.
4.4.6.6 Installing the receiver 126
4-4-7 Helicopter Balance 126
4-4-8- Setting up a Teratel servo 126
4-4-9- Serving ailoron servo, elevator127
4-4-10- Collective servo setup 128
4-4-11- Set the servo to 128
4-4-12-Setting the 129
Chapter 5 Parts to Buy 130
5-1- Introduction 131
Main Parts 132
Main chassis 133-1
5.2.2 Engine and Accessories 134
5.2.3-Docking connections 136
5.2-4- Grasshopper control plate swab system 136
5.2-5 Servo and jiro 137
6.2.6 Radio Control and Receiver 138
Chapter 6 Designing and Manufacturing Components and Manufacturing Reports 139
6-1- Introduction 140
6.2 AutoCAD Maps 141
6.2.1- Drawings of tail fins 142
6.2-2- Tail structures 143
6.2.3. POWER TRANSMISSION SYSTEM 143
6.2-4- Body design similar to Apache 144 helicopter
6-3 Construction Report 145
6-3-1- Body fittings 145
6.3-2- Engine connections and accessories 146
6.3-3 Power transmission belt 147
6.3-4-Making Tips 147
6.3-5 Installing Servers 147
6.3-6- Installing Jiru 147
6.3-7- Receiver installation 148
6.3-7- Chassis installation and freedom of movement test 149
References 150
Attachments (maps and sample quadrupole radio control circuit) 153
Flying has always been the most beautiful wish of mankind. Perhaps the earliest ideas for flying were to think of a device like a modern helicopter.
The examples below are first thoughts. In 1745, Da Vinci drew a sketch of his intended structure and made another lomonoco machine.
Reaching advanced helicopters from today's high-speed helicopters is the path that humanity has taken quickly. The lynx helicopter (Figure 1-3, 1978 Site Reference Production) The US has a record speed of 401 kilometers per hour, the fastest helicopter in the world, capable of flying back, sides and even down at speeds of about 100 kilometers per hour.
Figure (1-3) American lynx helicopter from Bell site
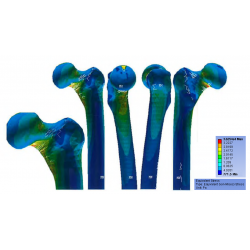
But flying a helicopter is very complicated and not like putting a metal ball or a tile on a piece of glass. There are many complexities to control, and these complexities are most evident when designing and manufacturing components. If the mechanical parts of the helicopter are perfectly tuned, it is as if that piece of glass is a flat glass. If the helicopter is not set up, it is as if the glass is convex, in which the bearing tends to move around. Static flight imbalance! The whole process of controlling the helicopter from getting up to sitting is very complicated and overwhelming. Figure (1-4) is an example of the degree of vacuum
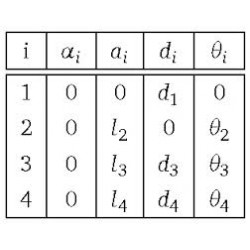
Data sheet
Induction Speed 10.2
2.2-11 Conical Angle 11
2-2-12- Blade loss factor 11
2-2-13- Flutter 12
2-2-14- Backward or Dragging13
2-2-15- Cyclic feathering14
3.2.2 Selecting Airfoil Blades 43
3.2.2 Selecting the shape of the blades 46
3.2.2 Selecting the shape of the cross section of the blades 47
3.2.2-Calculate the rotor inertia 48