


fuzzy control
Chapter 3 deals with fuzzy concepts. In this section, control is based on fuzzy concepts. Fuzzy control is developed to solve real-world problems, fuzzy logic, fuzzy tuning, fuzzy modeling, and all-human fuzzy control methods are introduced and themed by human emotion. be. If the fuzzy interpretation is correct and the mathematics of fuzzy theory work, then one can solve real-world problems after completing the fuzzy function in the fuzzy environment and then return it to its original world, non-fuzzy space, and This is what is being said under the terms fuzzy, fuzzy,

Security policy (edit with Customer reassurance module)

Delivery policy (edit with Customer reassurance module)

Return policy (edit with Customer reassurance module)
motion. be. If the fuzzy interpretation is correct and the mathematics of fuzzy theory work, then one can solve real-world problems after completing the fuzzy function in the fuzzy environment and then return it to its original world, non-fuzzy space, and This is what is being said under the terms fuzzy, fuzzy, and non-fuzzy [?].
Although fuzzy control is for ambiguous definition systems, its theory is not ambiguous, on the contrary it is very robust, and fuzzy logic is a particular type of logic, and fuzzy mathematics is a branch of mathematics. It is shown below that fuzzy control logic is a logic control technique that uses programmable logic controllers that employ both binary and digital classical logic using simple fuzzy logic expressions.
Most fuzzy control systems are systems whose fuzzy model or controller is based on a set of rules if - then based on the experience and knowledge of the designer. The first type of fuzzy control system is that fuzzy logic directly takes over all control activities and completely replaces the classical control system. Another variant comes with the classic control system alongside it and is part of the hybrid control system to improve control. [?]
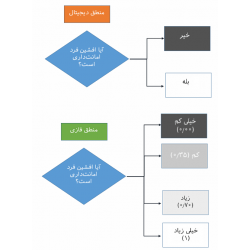
The overall structure of a Fuzzy Logic Controller (FLC) or a Fuzzy Controller (FC) controller is summarized in three basic parts [?]. Fuzzy (the part associated with inputs). Inference engine based on fuzzy rules. Non-fuzzy (the part that relates to outputs).
These 3 steps are illustrated in Figure 1.
Figure 1: Schematic of a fuzzy controller.
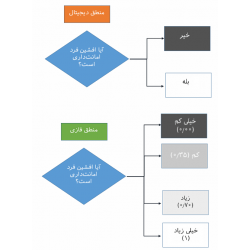
The fuzzy module converts the physical values of the input signals into the fuzzy values normalized to the input change interval along with a series of membership functions that represent the degree of membership (degree of input of this input to the range of changes) of these values in the change interval. The fuzzy controller inference engine has a key role in its performance by following a series of if-then rules [?].
• R ^ 1: If x_1 is X_11 AND ... AND input x_n is E_1n Then output y_1 is Y_1
.
.
.
• R ^ m: If x_1 is X_m1 AND ... AND input x_n is E_mn Then output y_m is Y_m
These m rules produce m the output of the controller, which of course may overlap and sometimes result in a 2-rule rule. The basis of these basic rules is very much dependent on the designer's experience, which requires sufficient knowledge of process, analysis and design skills. A good design will make the controller work and a better design will make it work more efficiently.
The non-fuzzy constructor module is the interface between the rule-based control and the physical process under control, which acts as a mapping of the space of rules and linguistic variables to the complex variables obtainable by the process and converts these variables into physical processes for control. he sends.
For fuzzy control routing, the input of the robot's current positioning system is sensor data from the path. The output of the system is also the speed and direction of the robot's movement. Numerous papers on fuzzy control routing have been presented [?,?,?,?]. Each of these articles introduces rules that are more universal and can be routed regardless of the type of robot. Therefore, in fuzzy control routing, how fuzzy the inputs are and their segmentation as well as the simple and smooth rules are important.
One of the disadvantages of fuzzy control is the system slowdown due to the large number of rules. If the system inputs are high, the rules are greatly increased and the output calculation will not be real-time. Therefore, reducing system inputs is important. The dynamic e-puck base robot has 8 infrared sensors and the number of rules will be extremely high if any sensor data is considered as input. Therefore, a method has to be adopted to integrate the sensor data into fuzzy control.
2 Routing the robot in an unknown environment by fuzzy-potential control method
Robot routing in unknown environments is performed in a variety of ways, including potential field method, genetic algorithm and fuzzy control, which is the most common potential field method in recent decades. When navigating the robot in an unknown environment, it should be noted that none of the present algorithms provide the optimal path because the optimal path requires knowing the whole environment. Algorithms and control methods are actually guaranteed to achieve the goal in the fastest possible time, depending on the structure of the algorithm and the control method.
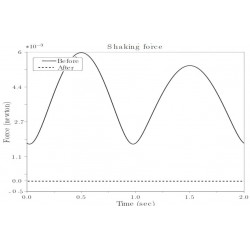
The potential field method is important because it is easy to implement and real-time on the robot. But the problem with the field potential is the local minimum and the robot not moving (the robot is vibrating). The fuzzy controller, despite its vast control capability, has many rules regarding the structure of the robot being tested, as well as the number of sensor sensors that the system will not be real-time.
To solve this problem, a combination of fuzzy control and potential field is used. With a

Data sheet
fuzzy control
Chapter 3 deals with fuzzy concepts. In this section, control is based on fuzzy concepts. Fuzzy control is developed to solve real-world problems, fuzzy logic, fuzzy tuning, fuzzy modeling, and all-human fuzzy control methods are introduced and themed by human emotion. be. If the fuzzy interpretation is correct and the mathematics of fuzzy theory work, then one can solve real-world problems after completing the fuzzy function in the fuzzy environment and then return it to its original world, non-fuzzy space, and This is what is being said under the terms fuzzy, fuzzy,