






پیشرفت¬های شگرف تکنولوژی سبب افزایش روز ¬افزون استفاده ازربات¬ها در زمینه¬های مختلف صنعتی و تحقیقاتی شده است. قابلیت برنامه¬ریزی برای ربات¬ها و به تبع آن ساده بودن تغییرات در وضعیت و وظایف آن-ها موجب ایجاد برتری¬های چشمگیری نسبت به مکانیزم¬هایی که برای یک وظیفه مشخص طراحی شده¬اند، می¬شود. یکی از مهم¬ترین بخش¬های طراحی ربات¬ها که ضامن دقت و تکرار¬پذیری عملکرد آن¬ها می¬باشد، طراحی کنترلر می¬باشد

Security policy (edit with Customer reassurance module)

Delivery policy (edit with Customer reassurance module)

Return policy (edit with Customer reassurance module)
پیشرفت¬های شگرف تکنولوژی سبب افزایش روز ¬افزون استفاده ازربات¬ها در زمینه¬های مختلف صنعتی و تحقیقاتی شده است.
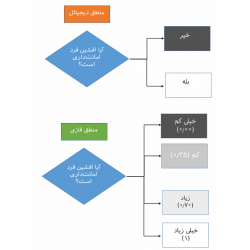
گرفتن ایمن یک جسم با استفاده از سیستم استنتاج فازی عصبی تطبیقی توسط یک گریپر ربات
تقدیم به ....
فهرست عناوین
عنوان صفحه
1-6 انگیزه و ضرورت انجام پروژه. 25
2 مدلسازی سینماتیکی و دینامیکی ربات... 27
2-1-4 پارامتر دناویت هارتنبرگ... 35
2-2 معادلات سینماتیک ربات اسکارا 37
2-2-1 سینماتیک مستقیم ربات... 37
2-2-2 سینماتیک معکوس ربات... 38
2-2-3 تعداد پاسخهای مسئله سینماتیک و افزونگی.. 39
2-3-1 پارمترهای مورد نظر در دینامیک.... 41
2-3-2 معادلات دینامیک ربات اسکارا 42
2-3-3 معادلات دینامیک جسم.. 45
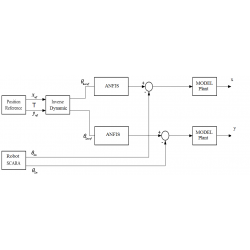
2-4 شماتیک کنترل مدل ربات... 49
3 طراحی شبکه عصبیفازی تطبیقی و کنترل.. 51
3-1 طراحی شبکه عصبی- فازی تطبیقی.. 52
3-1-2 نگارش قوانین شبکه عصبی فازی.. 59
3-2-1 کنترلر تناسبیمشتقگیرانتگرالگیر. 67

مشخصات
احتمالا با این موارد هم علاقمند باشید
پیشرفت¬های شگرف تکنولوژی سبب افزایش روز ¬افزون استفاده ازربات¬ها در زمینه¬های مختلف صنعتی و تحقیقاتی شده است. قابلیت برنامه¬ریزی برای ربات¬ها و به تبع آن ساده بودن تغییرات در وضعیت و وظایف آن-ها موجب ایجاد برتری¬های چشمگیری نسبت به مکانیزم¬هایی که برای یک وظیفه مشخص طراحی شده¬اند، می¬شود. یکی از مهم¬ترین بخش¬های طراحی ربات¬ها که ضامن دقت و تکرار¬پذیری عملکرد آن¬ها می¬باشد، طراحی کنترلر می¬باشد