- حراج!











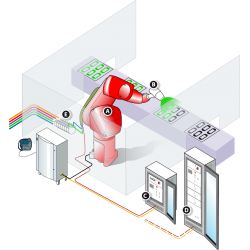

اهمیت همزمانی عکسالعمل ربات با وقایع خارجی حس میشود، باید از زبانهای کنترل کننده رباتها هم در نظر گرفته شده است. این نوع برنامهنویسی امکان ارتباط آسانتر با ربات را فراهم میآورد. باتوجه به توضیحاتی که در مورد بخشهای مختلف یک ربات داده شد، میتوان یک نمای شماتیکی به صورت زیر برای آن درنظر گرفت.

Security policy (edit with Customer reassurance module)

Delivery policy (edit with Customer reassurance module)

Return policy (edit with Customer reassurance module)
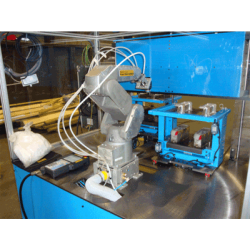
فهرست عناوین عنوان صفحه 1 مقدمه: 11 1-1 پیش زمینه 11 1-1-1 سیستم مکانیکی مفصلشده 12 1-1-2 تحریککنندهها 12 1-1-3 ابزارها و یا سیستمهای انتقال 12 1-1-4 سنسورها 12 1-1-5 مغز یا کامپیوتر ربات 12 1-2 تقسیمبندی تاریخی رباتها 14 1-2-1 رباتهای برنامهناپذیر یا رباتهای نسل صفر 14 1-2-2 رباتهای برنامهپذیریا رباتهای نسل اول 14 1-2-3 رباتهای آداپتیو یا رباتهای نسل دوم 14 1-2-4 رباتهای هوشمند یا نسل سوم 14 1-3 سنسورها در ربات 15 1-3-1 دوربین ویدیویی 21 1-3-2 اودومتری 22 1-3-3 امواج Ultrasonic 23 1-3-4 کاربرد سنسورهای Ultrasonic در رباتیک 24 1-3-5 سنسور سونار: 26 1-3-6 عملکرد سنسور: 27 4-1 انواع ربات و کاربرد آنها در صنعت: 27 1-3-7 تولید 28 1-3-8 اکتشاف، جستجو و استخراج 28 1-3-9 پزشکی 29 1-3-10 کارهای ساختمانی 30 1-3-11 رباتهای سری در کارخانجات 31 1-3-12 روشهای کنترلی 35 6-1کنترل PID: 37 1-4 شبکه عصبی مصنوعی 37 1-4-1 تاریخچه 37 1-4-2 تعریف 38 1-4-3 اجزا شبکه عصبی 39 1-4-4 آموزش شبکه عصبی 40 1-4-5 کاربرد شبکه عصبی 41 1-5 منطق فازی 42 1-6 مدل آنفیس 43 1-7 الگوریتمهای ژنتیک 44 1-7-1 بهینه محلی و بهینه کلی 46 1-7-1-1 عملگرهای یک الگوریتم ژنتیک 48 8-1 انگیزه و ضرورت انجام پروژه: 48 2 مقدمه 51 2-1 مفهوم ناوبری ربات متحرک 53 2-2 ادغام اطلاعات در ناوبري ربات متحرك 54 2-2-1 ادغام اطلاعات سطح پايين و سطح بالا 55 2-3 امواج صوتی 56 2-3-1 سنسورهای اولتراسونیک 57 2-3-2 سونار 58 2-3-3 سونار فعال 60 2-3-4 آناليز دادههاي سونار فعال 62 2-3-5 سونار غير فعال 63 2-3-6 سرعت صوت 63 2-3-7 شناسايي منبع صدا 65 2-3-8 نويز 66 2-3-9 سونار در جنگ 67 2-4 شناسايي سيگنال بازگشتي 67 2-5 فيشرايزهاي اكوستيكي 69 2-5-1 كاربرد فيشرايزهاي اكوستيكي 69 2-6 جمعبندی 70 3 مدلسازی و معرفی سيستم های هوشمند 72 3-1 شبكه هاي عصبي 72 3-1-1 توابع محرك 73 3-2 شبكه هاپفيلد 73 3-2-1 ساختار شبكه هاپفيلد 74 3-2-2 عملكرد شبكه هاپفيلد 75 3-2-3 شبكه هاي رقابتي، خود سامانده 75 3-2-4 شبكه هاپفيلد گسسته: مدل ترتيبي ( غير همزمان ) 76 3-2-5 تابع انرژي در شبكه هاي هاپفيلد 76 3-2-6 مرحله آموزش ( ذخيره سازي الگو ) 76 3-2-7 شبکه هاپفيلد پيوسته 77 3-2-8 گنجايش شبكه هاي هاپفيلد 77 3-2-9 الگوريتمهاي تكاملي 77 3-2-10 همگرايي الگوريتمهاي تكاملي 78 3-3 کنترل کننده های فازی 79 3-3-1 ساختار كلي كنترل كننده هاي فازي 79 3-3-2 پايگاه معرفت 81 3-3-3 بخش تصميم گيري يا موتور استنتاج 81 3-3-4 غير فازي كننده 81 3-3-5 انواع كنترل كننده هاي فازي 82 3-3-5-1 كنترل كننده فازي از نوع غير مستقيم 82 3-3-6 توانايي يادگيري كنترل كننده ها 83 3-3-6-1 يادگيري با سرپرستي 84 3-4 جمعبندی 85 4 معادلات کنترل سینماتیکی ربات حاضر 87 4-1 طراحی کنترلر 92 4-2 مسیر یابی ربات در محیط ناشناخته به روش کنترل فازی -عصبی 94 4-2-1 مدلسازي محيط به صورت دقيق 94 4-2-2 عملگر شبکه عصبی 96 4-2-3 کنترل کننده ربات 97 4-3 شناسایی هدف در محیط ناشناخته 101 4-4 2 شناسایی به کمک اودومتری 102 4-5 موقعیت یابی اجسام به کمک شبکه عصبی 104 4-6 شبکه عصبی پرسپترون چندلایه 107 4-6-1 بهینه سازی به روش دیفرانسیل تکاملی 108 4-6-2 بهینه سازی به روش پس انتشار خطای لونبرگ-مارکوارت 108 4-6-3 شبکه ANFIS 109 4-6-4 شبکه LoLiMoT 111 4-6-5 آزمایش شبکههای عصبی 112 4-7 الگوریتم اجرایی پیدا کردن هدف در محیط ناشناخته 117 4-8 نتیجه گیری و بحث 118 5 مسیریابی رباتهای پایه پویا در محیط شناخته شده 121 5-1 مقدمه 121 5-2 طراحی مسیر در محیط شناخته شده 121 5-2-1 کنترل بهینه زمان و انرژی 122 5-2-2 طراحی مسیر ربات حاضر به صورت offline 123 5-3 طراحی کنترلر تعقیب مسیر برای همکاری چند ربات 125 5-3-1 معادلات کنترل غیرخطی سینماتیک ربات 125 5-4 نتیجه گیری و بحث 127 6 نتیجهگیری و پیشنهاد کارهای آتی 129 فهرست تصاویر عنوان صفحه شکل1. 1 شماتیک ربات 14 شکل1. 2 شماتیک کنترلر و سنسور در ربات 15 شکل1. 3 سنسور فشار تماس 18 شکل1. 4 انکدرهای افزاینده 20 شکل1. 5 واحد نور 20 شکل1. 6 سیستم بینایی ربات 21 شکل1. 7 نحوه حرکت سنسور 22 شکل1. 8 نمونه ای از کاربرد سنسورهای Ultrasonic در روباتیک 25 شکل1. 9 نمونه ای از کاربرد سنسورهای سونار در روباتیک 26 شکل1. 10 رباتی که به مریخ فرستاده شده است 29 شکل1. 11 جراحی با استفاده از ربات 30 شکل1. 12 ربات امداد رسان مخصوص زلزله 31 شکل1. 13 ربات رباتیک Okada 32 شکل1. 14 ربات استانفورد 32 شکل1. 15 ربات رباتیک یوتا 33 شکل1. 16 انعطاف پذیری بالا بازوی ماهر MultiChoiceGripper در گرفتن اشیاء با اشکال متفاوت 34 شکل1. 17 طراحی گریپرپاشش رنگ 34 شکل1. 18 ربات مورد استفاده توسط کلیمن 35 شکل1. 19 ربات مورد استفاده در (Seung Kwan Song 2009) 36 شکل1. 20 شبکه عصبی با یک لایه مخفی، سه ورودی و دو خروجی 40 شکل1. 21 بهینه سراسری و محلی. 47 شکل2- 1دادههای در یک محیط بسته 54 شکل2- 2نمونه مسیرهای عبوری توسط یک ربات. 56 شکل2- 3مسیریابی خفاش با امواج صوتی 57 شکل2- 4 سیگنال ارسالی و دریافتی 59 شکل2- 5مبانی محاسبه فاصله به کمک امواج صوتی 60 شکل2- 6آناليز دادههاي سونار فعال 62 شکل2- 7امواج سونار زیر دریا 63 شکل2- 8سونار در ربات 64 شکل2- 9استفاده از چند سنسور جهت کاهش نویز. 66 شکل3- 1نروني بدون بردار باياس b و در شكل سمت راست نروني با بردار باياس b را نشان ميدهد. 72 شکل3- 2نحوه استفاده از توابع راه انداز. 73 شکل3- 3نمونه عمکلرد شبکه هاپفیلد 74 شکل3- 4عملکرد رو به عقب و جلو در شبکههای عصبی 74 شکل4- 1 سینماتیک ربات پایه پویای حاضر. 87 شکل4- 2خط سیر ربات و روابط سینماتیکی در آزمایش اول (آ) مسیر طی شده (ب) در راستای زاویه θ (ج) در راستای محور X (د) در راستای محور Y. 90 شکل4- 3 خط سیر ربات و روابط سینماتیکی در آزمایش دوم (آ) مسیر طی شده (ب) در راستای زاویه θ (ج) در راستای محور X (د) در راستای محور Y. 91 شکل4- 4: شماتیک یک کنترلر فازی. 93 شکل4- 5 شماتیک کنترلر فازی-عصبی. 96 شکل4- 6 دام مسیریابی در شبکه عصبی. 97 شکل4- 7 ساختار یک شبکه عصبی ساده. 105 شکل4- 8 ساختار یک شبکه عصبی پرسپترون چندلایه. 107 شکل4- 9 شماتیک شبکه ANFIS برگرفته شده از [75]. 110 شکل4- 10شماتیک شبکه توابع عضویت برگرفته از [76]. 111 شکل4- 11 شماتیک محیط تهیه دادههای سنسوری. تعداد خطوط کوچک 144 عدد میباشد. 114 شکل4- 12 نمودار کاهش خطا در هر نسل برای آموزش شبکه MLP توسط الگوریتم DE (آ) فاصله جسم از ربات (ب) زوایه جسم نسبت به ربات. 115 شکل4- 13 مدل شبکه ANFIS (آ) برای فاصله جسم تا ربات (ب) برای زاویه جسم نسبت به ربات. 115 شکل4- 14 نمودارهای شبکه MLP به روش آموزشی پس انتشار خطای لونبرگ-مارکوارت (آ) خطای MLP در هر مرحله (ب) وضعیت آموزش (ج) خطای هیستاگرام در هر مرحله. 116 شکل4- 15 الگوریتم اجرایی پیدا کردن هدف در محیط ناشناخته. 117 شکل4- 16 نتیجه شبیهسازی در یک مجیط ناشناخته توسط کنترلر فازی-عصبی به کمک داده های سونار و اودومتر در سه آزمایش مختلف. 119 شکل5- 1 مسیر بهینه طراحی شده. 124 شکل5- 2آرایش حرکت ربات های برای سناریوهای مختلف به صورت دسته جمعی 126 شکل5- 3 حرکت به صورت دسته جمعی توسط دو و سه ربات 127 فهرست جداول عنوان صفحه جدول4- 1نمودار فازی (آ) نمودار فازی کنندهخروجی شبکه عصبیی جاذبه (ب) نمودار فازی کنندهخروجی شبکه عصبیی دافعه (چ) نمودار فازی کننده اختلاف زاویه سر ربات و برآیندخروجی شبکه عصبی(د) نمودار غیر فازی کننده سرعت. 98 جدول4- 2قوانین فازی مسیریابی ربات در محیط ناشناخته. 100 جدول4- 3 نمایش خطا برای تمام شبکه های عصبی. 114 فصل اول مقدمه و مروری بر ادبیات مقدمه: مبحث ناوبری یکی از گلوگاهای مهم در رباتهاست و این مهم در پنج شش سال اخیر شدیدا رشد کرده که دلایل این رشد را در ادامه خواهید دید. از سال 270 قبل از ميلادكه اولين عروسكهاي متحرك در يونان ساخته شد. ربات متولد شدو در حال حاضر رويای هوش مصنوعی به حقيقت پيوسته است اما هنوز يک تفاوت اساسی بين انسان و يک هوش مصنوعی وجود دارد ؛ اين که: مغز يک ربات درست است که اعمالي منطقی انجام میدهد يا به اصطلاح عاقلانه , ولی احساس انسانی ندارد. اگر روزی برسد که هوش مصنوعی د رحد احساسات يک انسانی پيشرفت کند زندگی چگونه خواهد بود ؟ کلماتی مانند زندگی ماشينی چه مفهومی پيدا میکنند؟ آيا انساني كه رويايش ساخت اين هوش مصنوعي است، تحمل زندگی با چنين موجودی را خواهد داشت ؟ در اين پژوهش سعی شده است تا روشهای هوشمندی که درموقعيت يابی و ناوبری ربات متحرک استفاده میشود برای خوانندگان با زبانی ساده توضيح داده شود. پیش زمینه تحقیقات به سمت طراحی و کنترل مجریهای نهایی پیچیده هدایت شده تا چالاکی و انطباق پذیری ربات را افزایش دهد. چالش اصلی ساخت بازوهای ربات عملگر بوده (به خصوص در محیطهای تولیدی) با ابزاری که از کف دست و رباتهای با مفاصل فعال تشکیل شده باشد. یک بازوی رباتیک به عنوا بهنظر میرسد در آیندهای بسیار نزدیک رباتیک در زمینه کارهای ساختمانی جایگاهی ویژه پیدا میکند.

مشخصات
احتمالا با این موارد هم علاقمند باشید
اهمیت همزمانی عکسالعمل ربات با وقایع خارجی حس میشود، باید از زبانهای کنترل کننده رباتها هم در نظر گرفته شده است. این نوع برنامهنویسی امکان ارتباط آسانتر با ربات را فراهم میآورد. باتوجه به توضیحاتی که در مورد بخشهای مختلف یک ربات داده شد، میتوان یک نمای شماتیکی به صورت زیر برای آن درنظر گرفت.